A Tool for the Future of Medical Technology
How do you develop a medical device for robot-assisted procedures that operates with precision, remains sterile, and can be handled safely in everyday clinical practice?
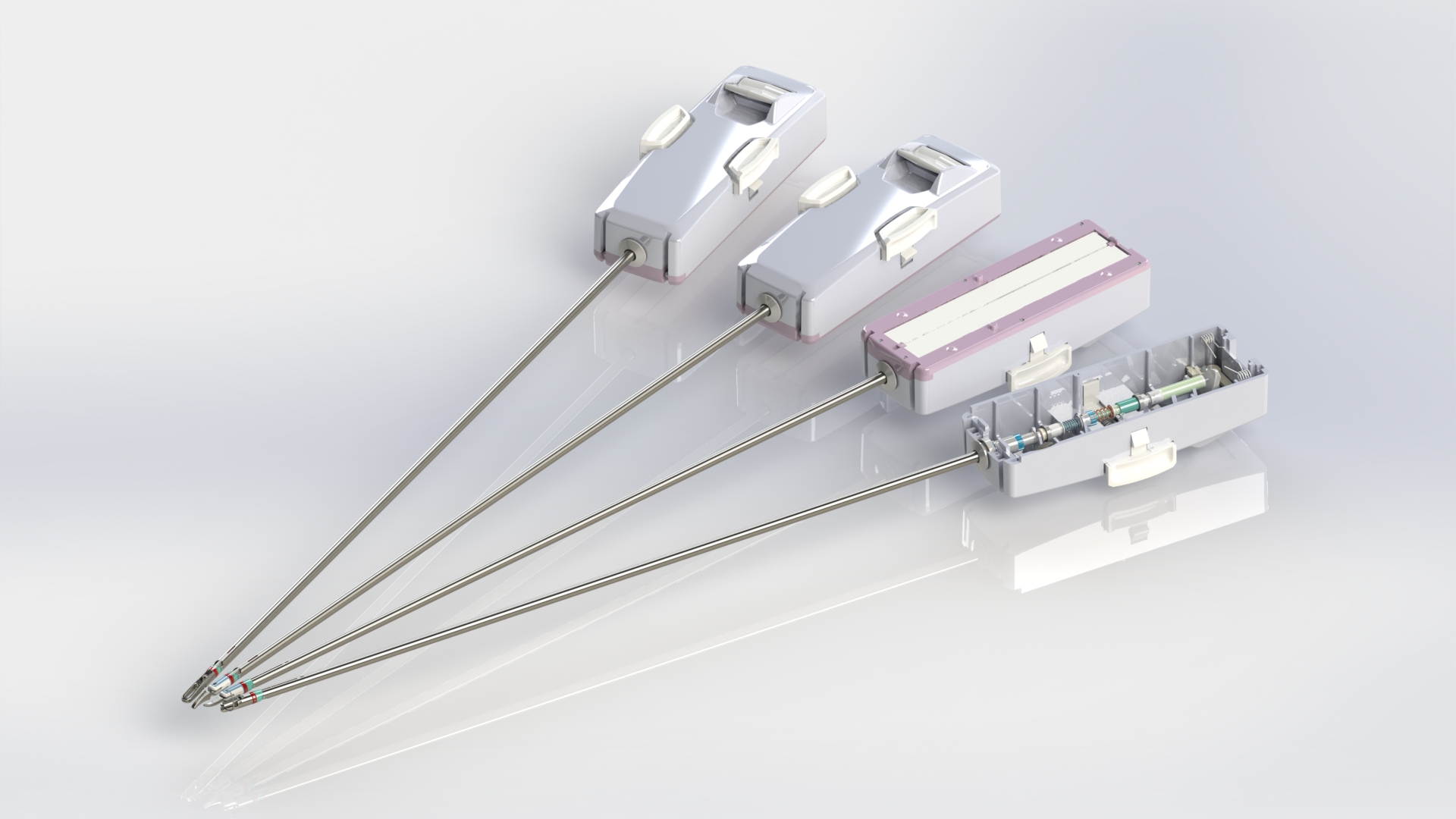
Our focus was on ensuring smooth motion transmission from the robot interface to the active tip, durable material joints, and a design that works reliably in mass production.
In robot-assisted surgery, every micrometer counts. We designed the mechanical development of the instrument from start to finish with precision, repeatability, and robustness in mind. Thanks to comprehensive 3D tolerance analysis, targeted compensation tolerances, and reliable coupling, the system functions without readjustment even after repeated attachment and detachment. The B-prototype was ready after three months.
Added to this was the combination of stainless steel and ceramic. Through bonding tests with various epoxy and silicone adhesives, as well as design adjustments, a hybrid structure was created that remains leak-proof and functional even after over 100 autoclave cycles. All interfaces are designed so that the instrument can be operated intuitively with surgical gloves, assembled without tools, and cleaned quickly.
At the same time, we optimized the design for mass production. Fewer components, injection-mold-ready design, and reduced assembly times ensure a system that functions seamlessly in the OR, in manufacturing, and in service.
Want to learn more? We’d be happy to help: https://buw-engineering.com/en/erfolgsgeschichte/surgical-precision-robotically-assisted/
